
Для записи трека использовалась отладочная плата Olimexino-STM32 . Выбрал ее не потому что она работает на микроконтролере STM32 а потому что в ней очень много функционала и к тому же она работает от 9в до 30в. На ней сразу установлен слот MicroSD. За всю экспедицию ее выключали только на ночь. В ней предусмотрено подключение и…
Рубрика: GPS
Вычисление расстояния между двумя GPS точками.
Возможно когда будите использовать GPS модуль Вам потребуется вычислить расстояние между двумя координатами. Приводим пример функции для вычисления расстояния между GPS координатами. #include <stdio.h> #include <stdlib.h> #include <math.h> #define EARTH_RADIUS 6372795 double TheDist (double fA, double sA, double fB, double sB); // #define M_PI 3.1415926535898 int main() { printf(«Метры: %f\r\n «,TheDist( 55.75, 37.617 , 54.188, 37.595 ));…
GPS приемник на базе модуля Quectel L30
GPS приемник на базе модуля Quectel L30 SIRFstarIVTM Цена модуля: 1150 рублей (Купить) Модуль предназначен для использования в радиолюбительских устройствах. Основное назначение: вычисление текущей позиции в системе GPS и выдача координат в стандарте NMEA0183 по протоколу UART. (скорость обмена по умолчанию 4800 бод) Программное переключение протокола в SiRF Binary. Диапазон скоростей UART 4800-115200 бод. Также возможно использование модуля для синхронизации времени…
GPS Tracker — устройство которое записывает Ваш пройденный путь.
При помощи GPS L30 модуля и шилда MicroSD от компании SparkFun можно создать свой собственный GPS Tracker. Для этого нам потребуется собственно сам MicroSD шилд. Купить этот шилд можно вот тут: http://shop.4robots.ru/product_11597.html Описание: Schematic FAT16 Library(Распаковать в папку Arduino Libraries. Перезапустить ПО Arduino.) Осталось скомпоновать GPS L30 модуль и подключить его. Вот что у нас получилось….

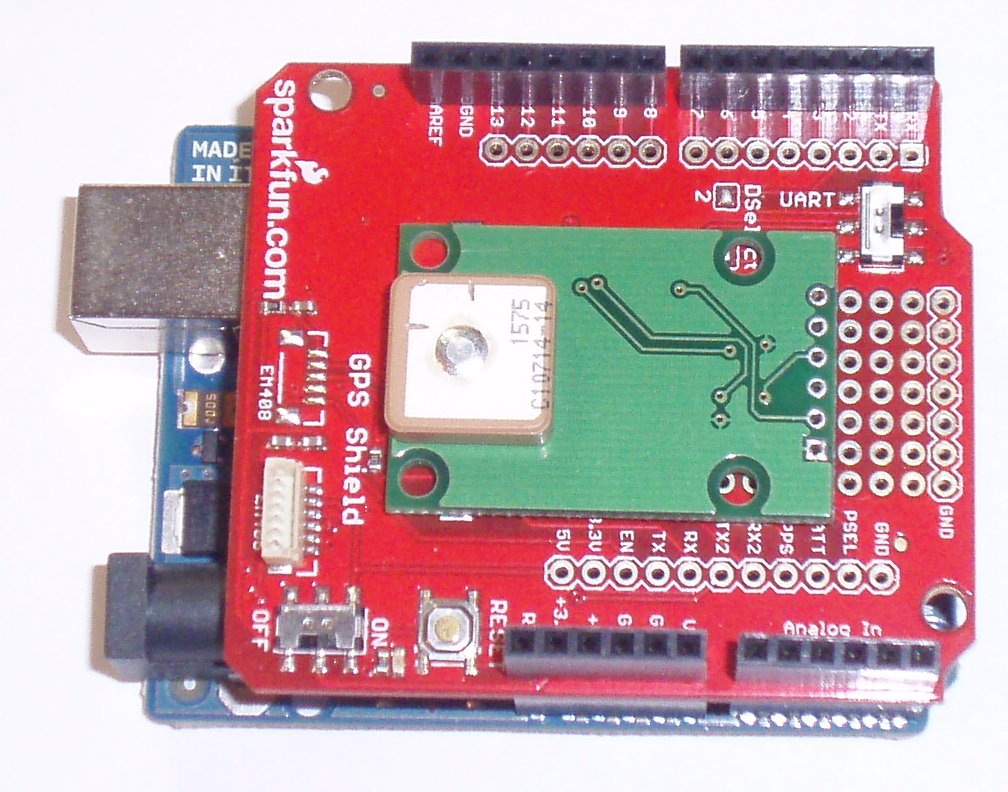
Подключение GPS L30 модуля используя GPS Шилд от SparkFun
И так сегодня рассмотрим вариант подключения GPS L30 модуля через GPS шилд от компании SparkFun. Страничка GPS шилда: http://shop.4robots.ru/product_13633.html Schematic Eagle Files GPS Quickstart Guide Example Sketch А вот пример как можно все это скомпоновать, осталось припаять проводники и можно начинать программировать. Для тестирования модуля Вам возможно потребуются следующие библиотеки. NewSoftSerial TinyGPS Все необходимое для этого можно купить в магазине www.4robots.ru